Comme je le disais dans mon précédent billet, je me lance dans un projet de drone plus petit et plus transportable que le gros S500.
Mon cahier des charges
- transportable facilement, idéalement pliant
- un contrôleur de vol offrant les mêmes fonctionnalités que le pixhack qui équipe le S500
- une autre plateforme logicielle qu'Arducopter, histoire de voir autre chose
- si possible, une seule caméra permettant de filmer et d'avoir un retour FPV
- un budget optimisé
Mon choix de composants
Le chassis
La frame est une GE260Z. Ce n'est pas la plus sympa côté look mais elle me semble suffisamment solide et évolutive. Elle est est pliante !
La propulsion
Sur ce type de chassis, des moteurs 1806 ou 2204 de 2300 KV sont conseillés.
Pour connecter tout cela, une carte de distribution Matek 5en1
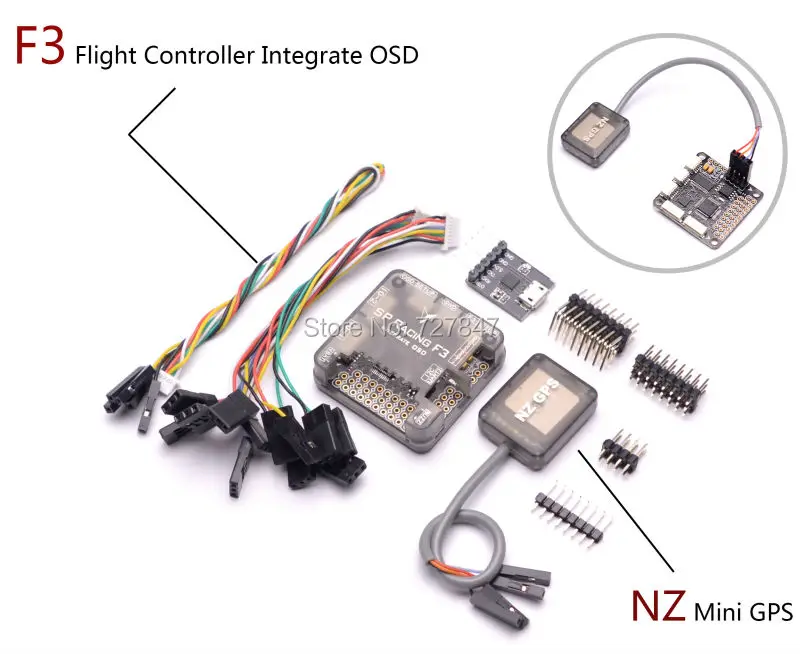
Le contrôleur de vol
Mon choix s'est porté sur le SP Pro Racing F3, une carte développée par le concepteur du logiciel CleanFlight. Ce n'est pas la plus récente mais elle a fait ses preuves et reste abordable, notamment dans ce combo avec mini GPS.
Le système FPV
On va dire que là, j'ai un peu cassé la tirelire. En effet, pour disposer d'une caméra capable à la fois d'enregistrer en qualité HD tout en renvoyant un flux vidéo FPV, les choix sont minces. Les ténors en la matière sont Mobius et Runcam.
Alors, après avoir épluché les avis, mon choix s'est porté sur la Runcam v2. L'émetteur vidéo est identique à celui que j'ai sur le S500 (Eachine TX526 5.8Ghz).
L'intérêt est que je pourrai également m'en servir sur le gros S500 dans la nacelle stabilisée mais aussi comme actioncam autonome. Je ne manquerai pas de faire un comparatif avec ma vieillissante mais toujours efficace Gopro Hero 2. 😀
Et pour alimenter tout ce petit monde, des classiques lipos 3S Turnigy de 2200mAh.
Et voilà, livraison dans 2-3 semaines.
[Update du 26/06/17]
Toutes les pièces ont été reçue, le châssis avec du retard et ... incomplet !
Ouverture d'un litige sur Aliexpress et changement de plan.
Finalement, ce sera un Robocat ! (comme quoi il faut toujours rester sur sa première idée...)